samedi 1 juin 2013
Hexa : matos complet
Par Mattt, samedi 1 juin 2013 à 10:38 :: Hexa
Je n'avais pas encore posté de photo de mon matos au complet en ordre de vol.
C'est maintenant chose faite avec cette photo. Nous avons donc :
- Une MX12
- Une Gopro Remote scratchée à la MX12 pour declencher avec l'index
- Une GoPro 3 black
- Une KK2.0
- Un Apache OSD et son GPS
- Un VTX immersionRC avec son antenne spiro
- Une seconde Lipo dédiée au VTX et l'OSD
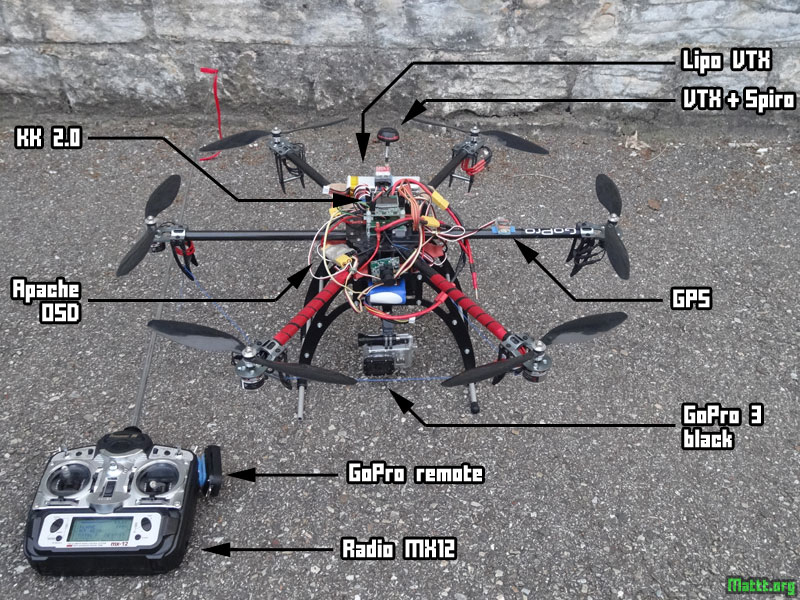
C'est avec ce matos que j'ai photographié la cité internationale
C'est maintenant chose faite avec cette photo. Nous avons donc :
- Une MX12
- Une Gopro Remote scratchée à la MX12 pour declencher avec l'index
- Une GoPro 3 black
- Une KK2.0
- Un Apache OSD et son GPS
- Un VTX immersionRC avec son antenne spiro
- Une seconde Lipo dédiée au VTX et l'OSD
C'est avec ce matos que j'ai photographié la cité internationale
aucun commentaire
:: aucun trackback :: 2628 vues
Tags : gopro, hexa, hexacopter, matos, mx12, photo, turnigy