mercredi 12 septembre 2012
Double tricopter : Hexacopter
Par Mattt, mercredi 12 septembre 2012 à 18:00 :: Hexa
Mi aout, apres plusieurs mois de tricoptère, j'avais envie d'un autre engin, plus gros, plus puissant (et cappable de soulever un appareil photo par exemple).
Je me suis donc mis à construire un Hexacopter (6 moteurs), voici le récit de sa construction
18 aout 2012 : reception du colis et montage
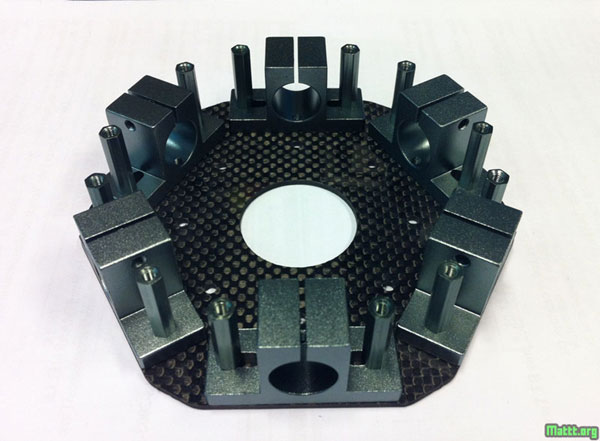
Je suis parti sur une frame en carbonne de chez Turnigy : Hexa Talon

D'une qualité superbe pour le prix, le montage est des plus simples (j'ai découvert le mode d'emploi au fond de la boite quand j'ai coupé le carton pour le jeter au bac papier ) et les finitions sont pas mal (voir photos)
) et les finitions sont pas mal (voir photos)
Coté mécanique c'est assez simple : une platine centrale, des pieces de maintient des bras qui sont fixées aux 6 angles pour maintenir les bras, et au bout des supports moteur avec pieds en carbone.
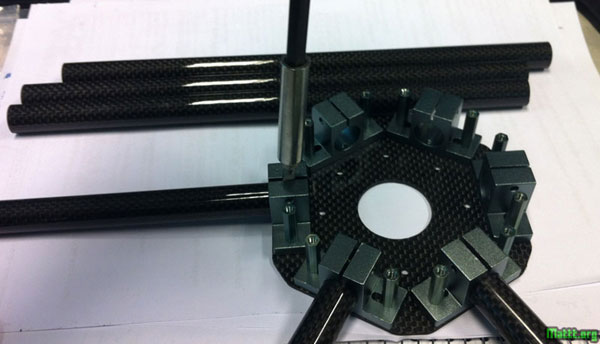

Autre avantage de la frame, ca tient pile dans le sac (le trico tient plié par contre) :

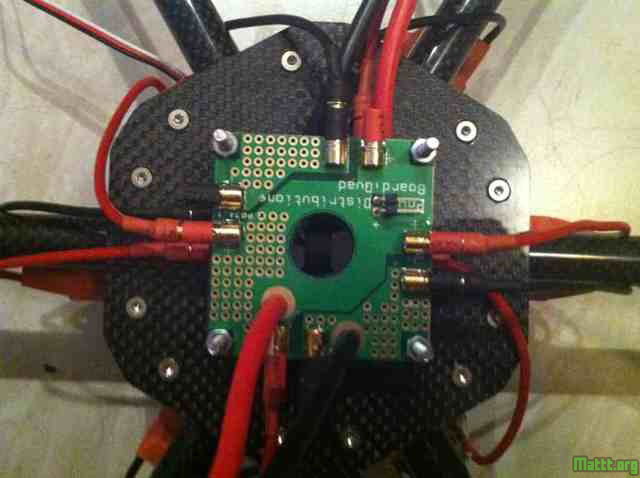
Coté éléctronique, c'est un peu plus complexe, car la partie centrale est vraiment petite;
du coup pas possible d'y glisser les ESC, ou meme la carte de controle.
19 aout 2012 : Deuxième phase de montage
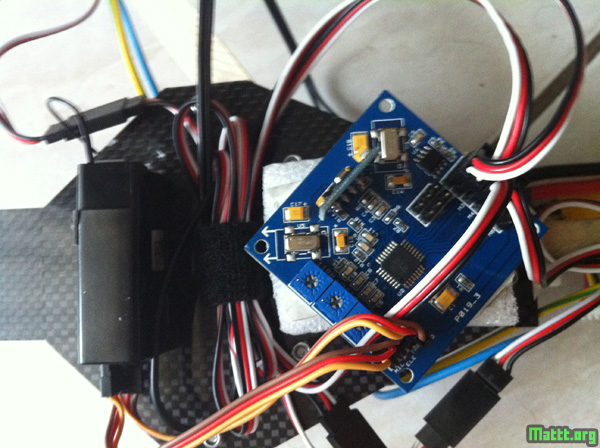
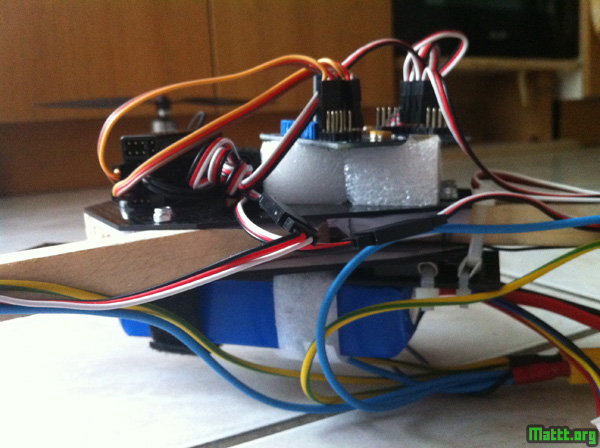
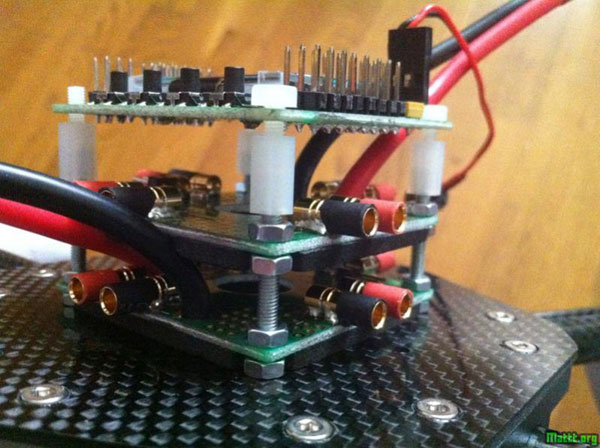
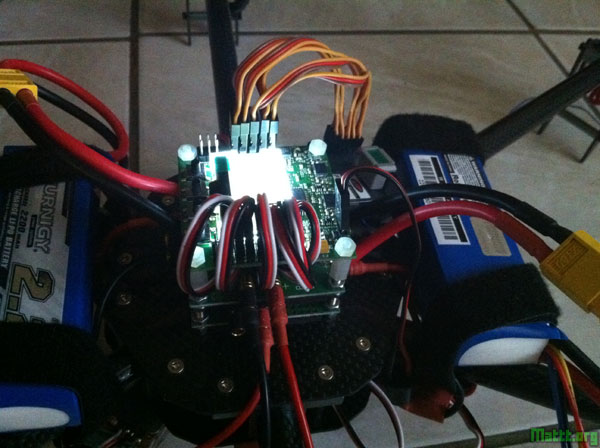
Du coup les cartes de distributions seront placées au-dessus avec la carte KK2.0 :
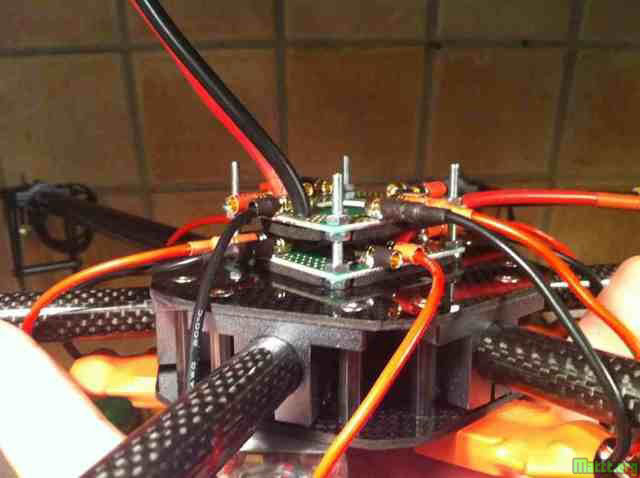
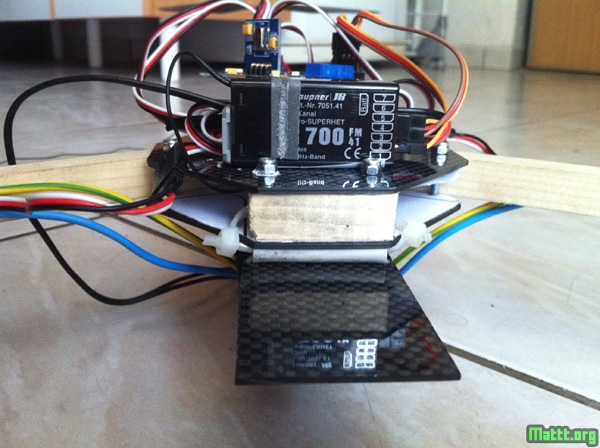
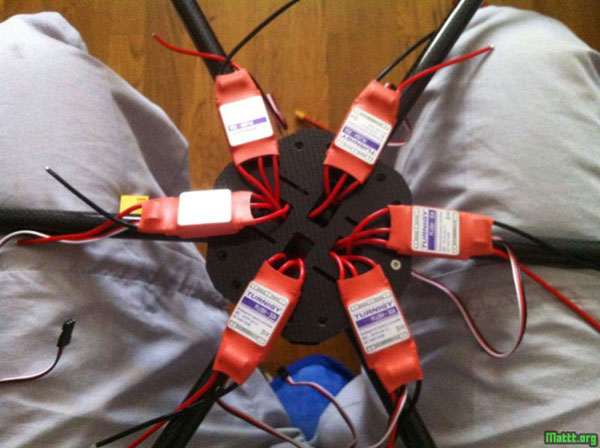
Et les ESC iront en dessous, les fils passant dans les tubes :

26 aout 2012 : Phase 3 du montage
Après une courte pause (je n'avais plus de connecteurs pour les moteurs), on s'occupe des moteurs, placés tête en bas, c'est mieux pour l'aération du corps du moteur :



Puis vient le moment de déterminer la place des lipos :

et de monter les helices :

Et voici le bestiau terminé :


Puis de lui fixer des pieds de fortune (recyclage power !) :

29 aout 2012 : On décolle
Et nous voila prêts pour les premiers essais : les moteurs tournent \o/
Puis le premier vrai décollage :
La même en version embarquée, on peut noter qu'il n'y a absolument aucune virbation (comparé au trico qui vibrait pas mal au début)
Puis On passe aux essais en plein air :
C'est super stable, nickel chrome et je n'ai pas encore touché aux trim ni aux reglages de la KK 2.0.
J'ai juste essayé de monter les moteurs tete en haut, car il y avait vraiment peu de place entre l'helice et le bras; mais j'ai eu un comportement étrange de l'hexa, il se met à moins bien réagir sur le gauche droite, et surtout j'ai été obligé de trimer à fond à droite, car il tournait sur lui-même.

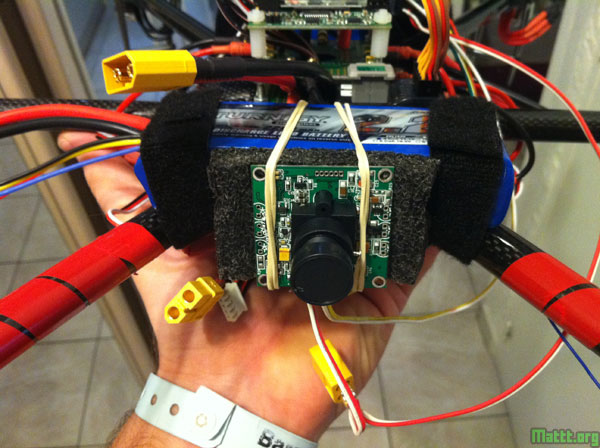
J'ai installé également le systeme FPV (avec cette petite CAM sony de chez HK à 16$ ultra lumineuse (limite trop en plein jour, et limite infrarouge la nuit tellement on voit dans les parties sombres) et une batterie LiPo recyclée de mon Hélico


Pour conclure,c 'est une machine sympa, super simple à piloter, et un peu plus lourde que le trico (1800Gr contre 800 pour le trico) et un peu plus petite, par contre plus encombrante car non pliable :

Je me suis donc mis à construire un Hexacopter (6 moteurs), voici le récit de sa construction
Je suis parti sur une frame en carbonne de chez Turnigy : Hexa Talon
D'une qualité superbe pour le prix, le montage est des plus simples (j'ai découvert le mode d'emploi au fond de la boite quand j'ai coupé le carton pour le jeter au bac papier
) et les finitions sont pas mal (voir photos)Coté mécanique c'est assez simple : une platine centrale, des pieces de maintient des bras qui sont fixées aux 6 angles pour maintenir les bras, et au bout des supports moteur avec pieds en carbone.
Autre avantage de la frame, ca tient pile dans le sac (le trico tient plié par contre) :
Coté éléctronique, c'est un peu plus complexe, car la partie centrale est vraiment petite;
du coup pas possible d'y glisser les ESC, ou meme la carte de controle.
Du coup les cartes de distributions seront placées au-dessus avec la carte KK2.0 :
Et les ESC iront en dessous, les fils passant dans les tubes :
Après une courte pause (je n'avais plus de connecteurs pour les moteurs), on s'occupe des moteurs, placés tête en bas, c'est mieux pour l'aération du corps du moteur :
Puis vient le moment de déterminer la place des lipos :
et de monter les helices :
Et voici le bestiau terminé :
Puis de lui fixer des pieds de fortune (recyclage power !) :
Et nous voila prêts pour les premiers essais : les moteurs tournent \o/
Puis le premier vrai décollage :
La même en version embarquée, on peut noter qu'il n'y a absolument aucune virbation (comparé au trico qui vibrait pas mal au début)
Puis On passe aux essais en plein air :
C'est super stable, nickel chrome et je n'ai pas encore touché aux trim ni aux reglages de la KK 2.0.
J'ai juste essayé de monter les moteurs tete en haut, car il y avait vraiment peu de place entre l'helice et le bras; mais j'ai eu un comportement étrange de l'hexa, il se met à moins bien réagir sur le gauche droite, et surtout j'ai été obligé de trimer à fond à droite, car il tournait sur lui-même.
J'ai installé également le systeme FPV (avec cette petite CAM sony de chez HK à 16$ ultra lumineuse (limite trop en plein jour, et limite infrarouge la nuit tellement on voit dans les parties sombres) et une batterie LiPo recyclée de mon Hélico
Pour conclure,c 'est une machine sympa, super simple à piloter, et un peu plus lourde que le trico (1800Gr contre 800 pour le trico) et un peu plus petite, par contre plus encombrante car non pliable :
10 commentaires
:: aucun trackback :: 6957 vues
Tags : helico, hexa, hexacopter, modelisme rc, multi, multirotor, talon, turnigy